Benchmark
GOPS supports both Mujoco environments and typical optimal control problems.
Mujoco Benchmark
This section presents the performance of a series of model-free RL algorithms in GOPS on the Mujoco environments. Every experiment is conducted under 5 random seeds for 1.5M RL iterations (30M environment steps).
Optimal Control Problems
This section presents the performance of several algorithms on typical industrial optimal control problems, including linear quadratic regulator (LQR), tracking problem, constrained control problem, robust control problem.
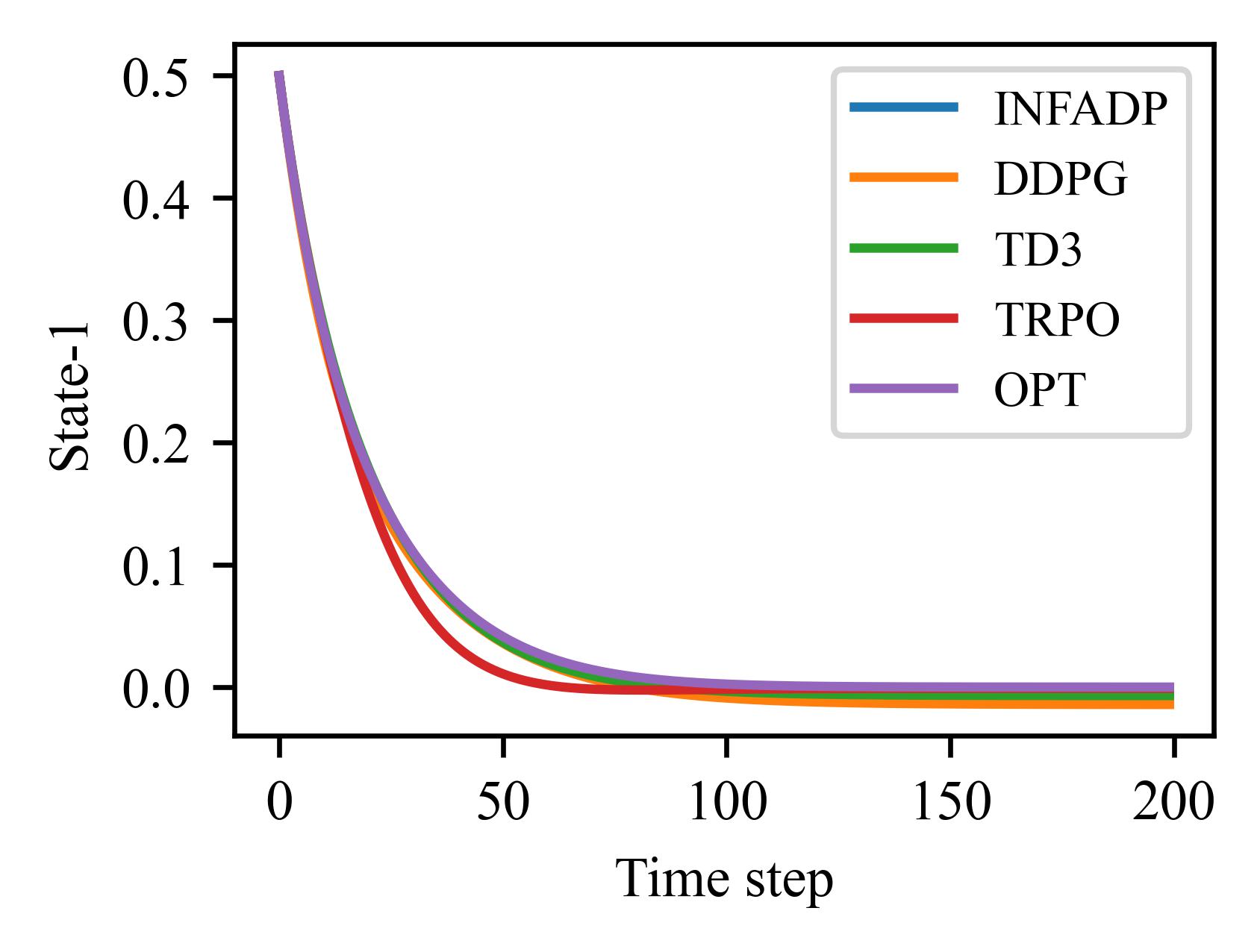
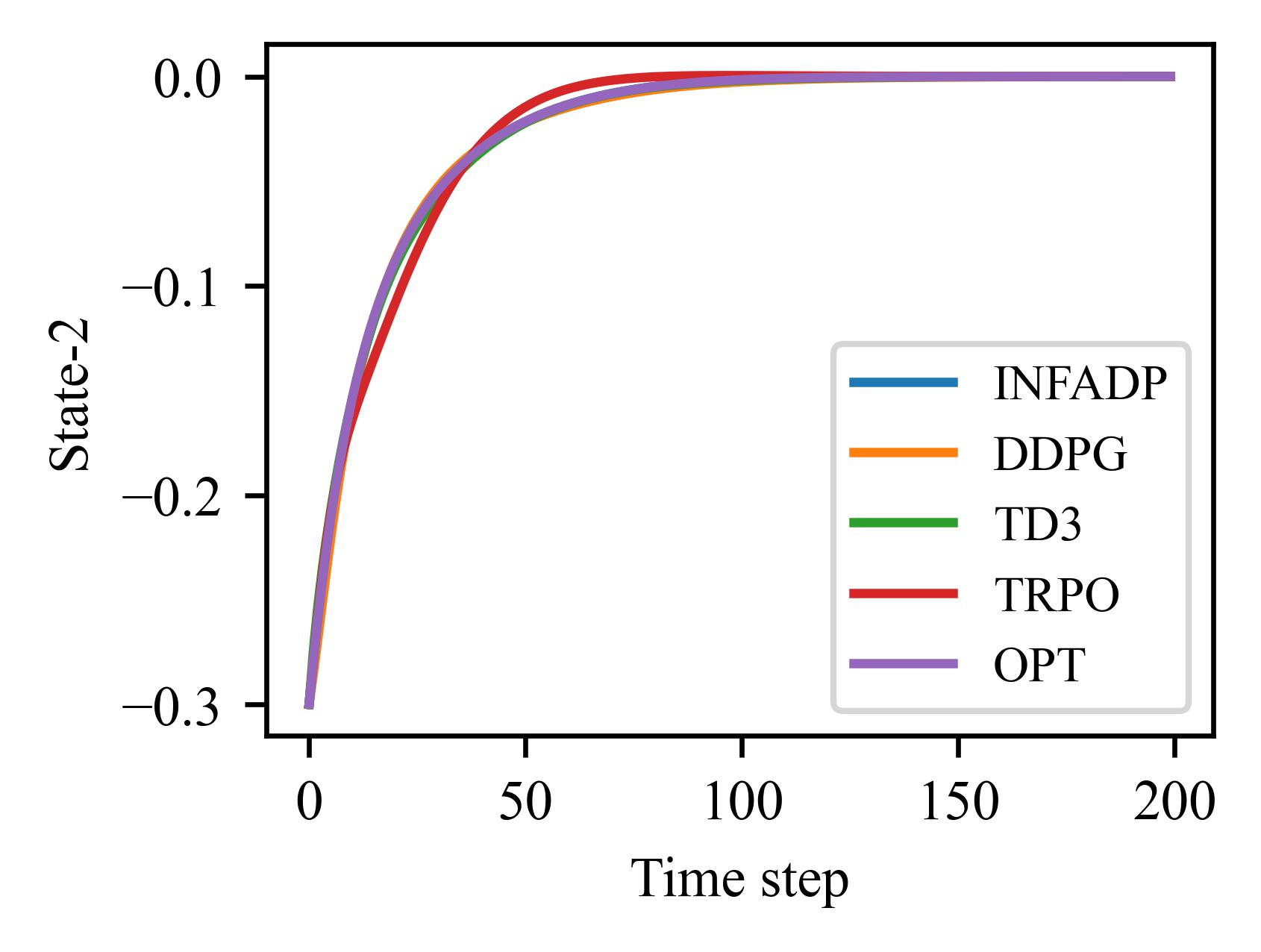
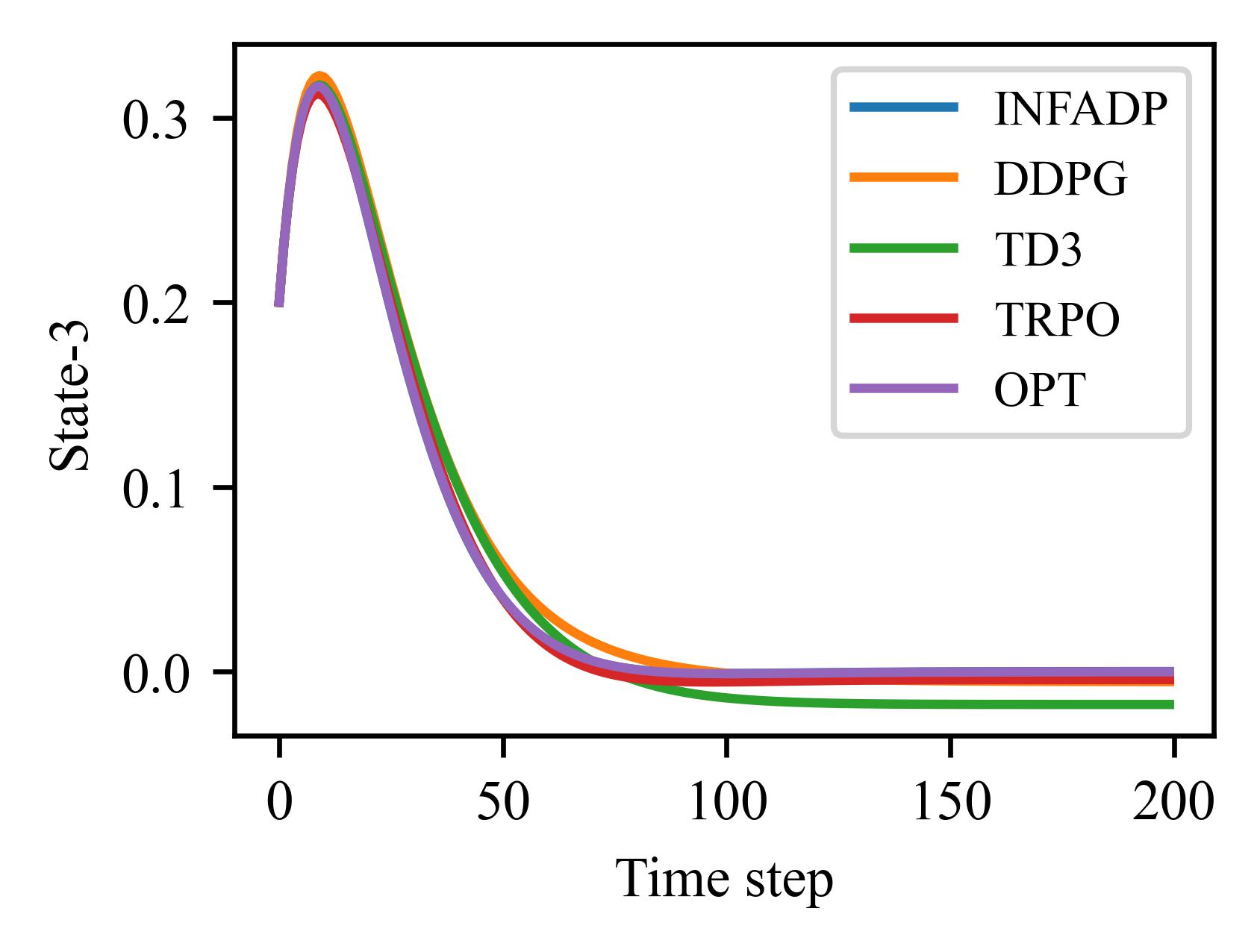
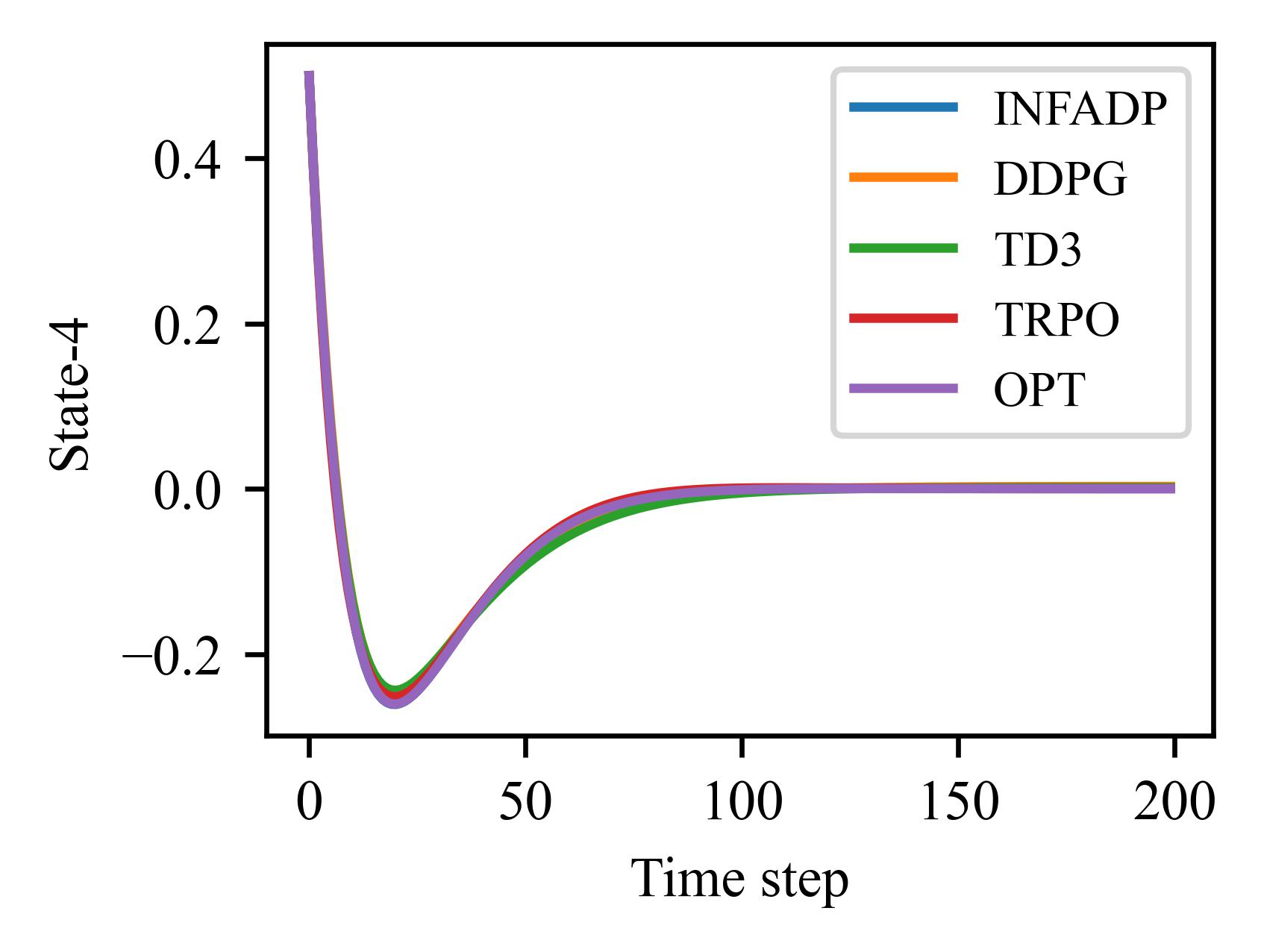
LQR
The figures and tables illustrate the performance of various algorithms on the LQR problem, which involves 4 states and 2 control inputs and can be solved using analytical methods. The algorithms are evaluated based on the relative error between the states and control inputs produced by their learned policies and those of the analytical solution.
Algorithm |
Max action-1 error |
Mean action-1 error |
Max action-2 error |
Mean action-2 error |
|---|---|---|---|---|
INFADP |
1.21% |
0.22% |
0.34% |
0.09% |
DDPG |
7.21% |
0.94% |
2.67% |
0.41% |
TD3 |
6.49% |
0.59% |
1.72% |
0.40% |
TRPO |
8.28% |
1.66% |
4.49% |
0.49% |
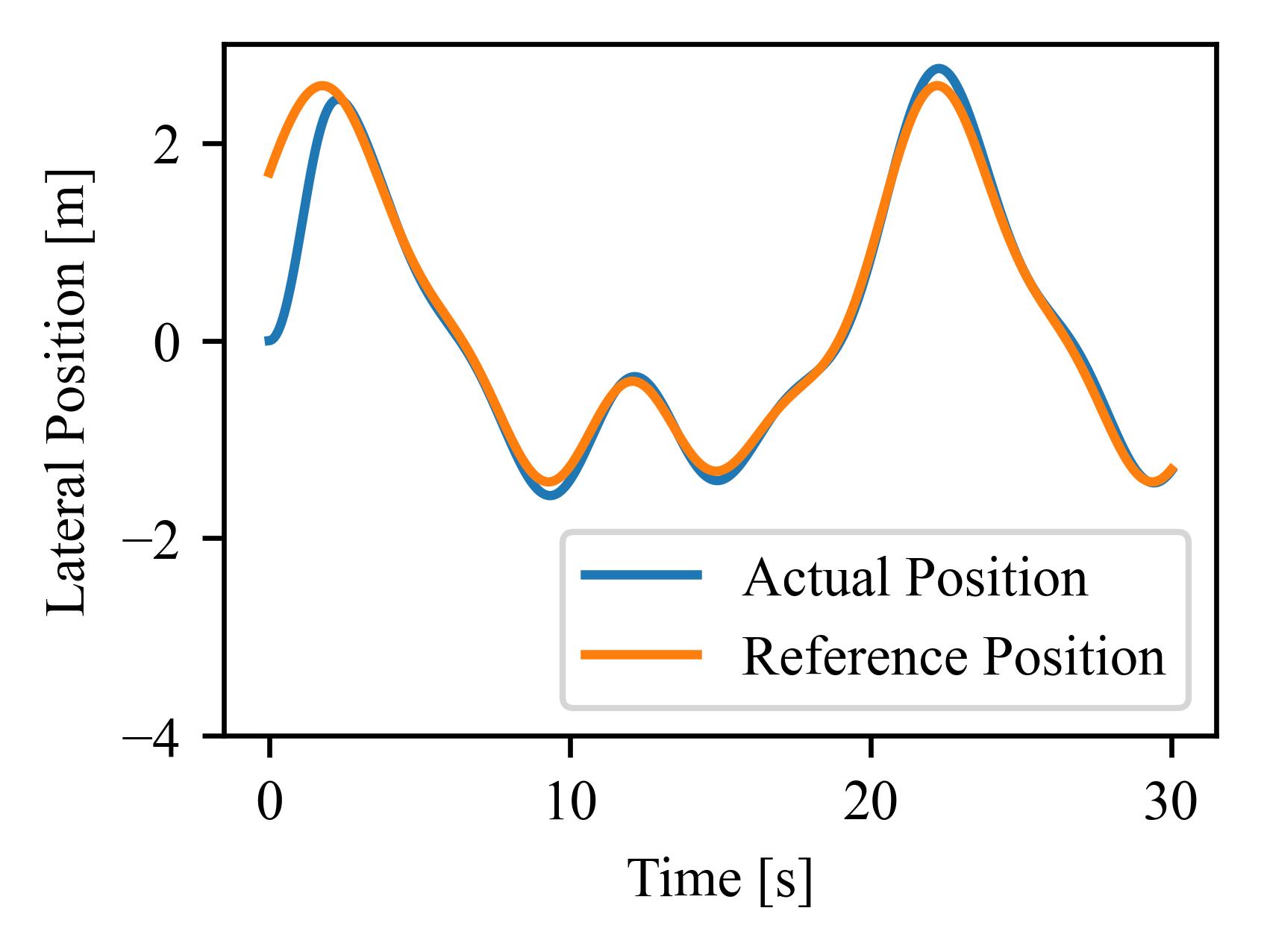
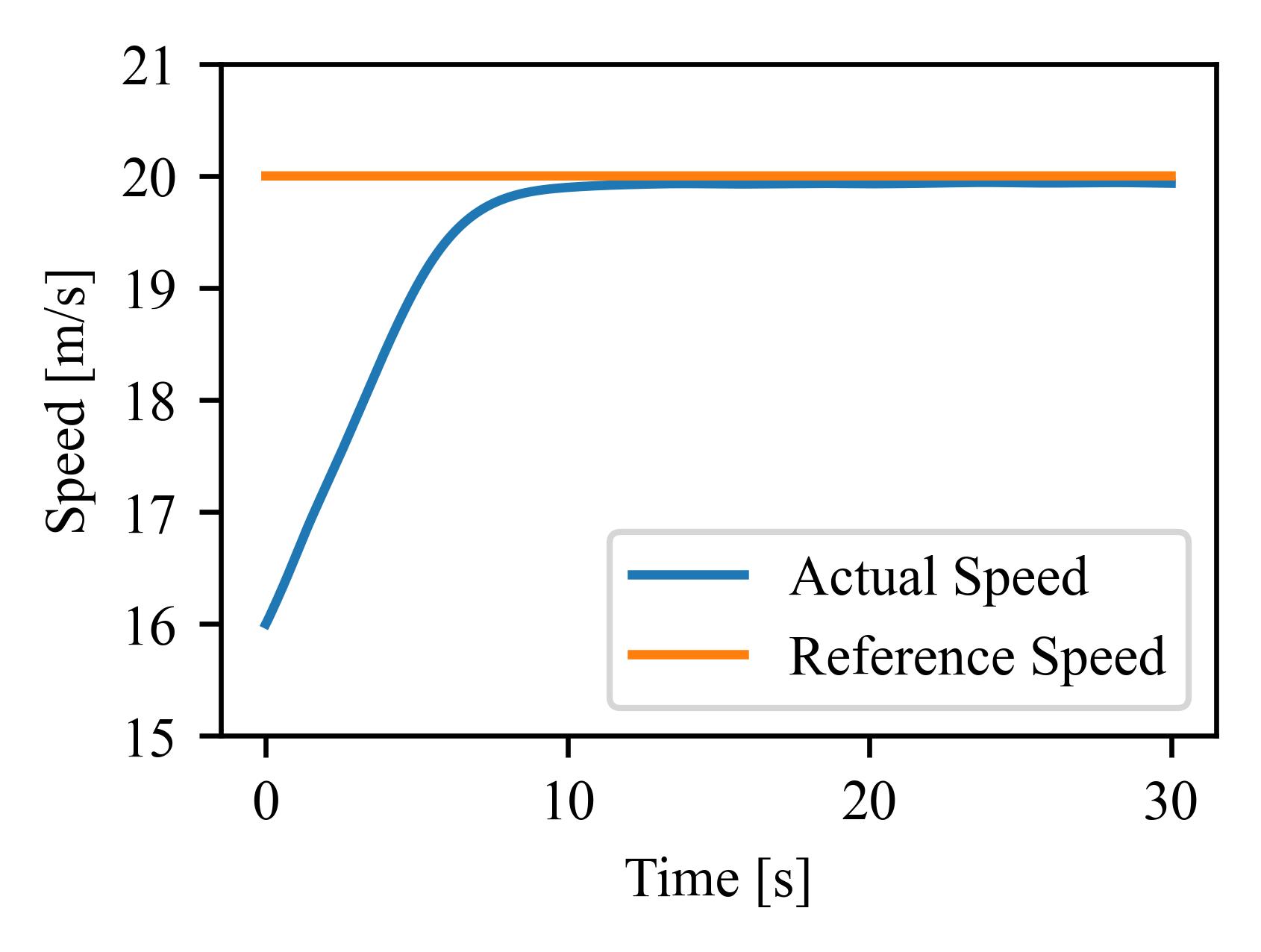
Vehicle Tracking
The figure and table show how well various algorithms perform on the vehicle tracking problem, a common optimal control problem in autonomous driving. The training environment is converted from an official simulink vehicle model using GOPS conversion tools. The trained policy is then tested in the simulink model to evaluate its closed-loop control performance.
Algorithm |
SAC |
DSAC |
PPO |
|---|---|---|---|
Position error (m) |
0.084±0.019 |
0.032±0.005 |
0.052±0.012 |
Velocity error (m/s) |
0.068±0.011 |
0.035±0.005 |
0.039±0.007 |
Constrained Control Problem
GOPS offers constrained RL algorithms that can handle constrained optimal control problems. In the mobile robot obstacle avoidance task shown below, the robot agent trained by SPIL algorithm is able to maintain a safe distance from obstacles. This is indicated by the negative constraint value along the robot’s trajectory.


Robust Control Problem
GOPS includes robust RL algorithms that can maintain acceptable control performance despite modeling errors and disturbances. In the active suspension control problem shown below, the robust policy trained using the RPI algorithm effectively reduces the vibration of the sprung mass under unknown roadbed disturbances compared to a no-control scenario.

